Week of 3/9
- euanr723
- Mar 13, 2025
- 2 min read

Throughout this week I have began to delve far deeper into learning how to use the nrf24l0. I first started this week by working on the code. The problem that I was trying to solve was how to send and receive the exact information I wanted. I first started by googling and reading some guides online about how each different line of code worked and also the system behind it. After I was able to figure out what each component did, I next moved on editing the code. With my main challenge being to figure out how to change the form of variable transmitted, as at first, I was not sure if it only worked for specific types of initialized variables. However after testing I found I could initialize and variable and then transmit this value to the receiver, allowing me to send the exact type of code I wanted to send.


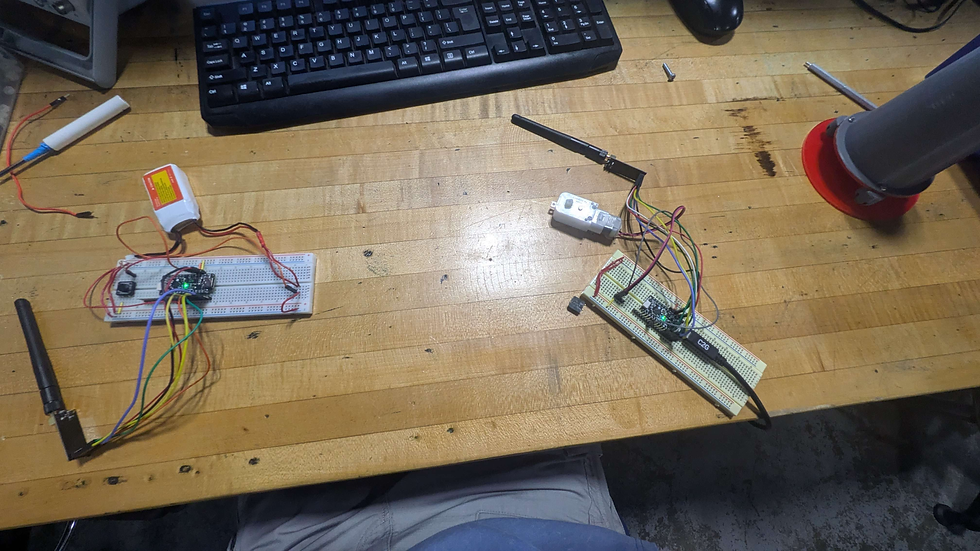
After figuring out how to set up the code properly I next moved on to attempting to test the capability of the transmitter and receiver. The idea was to set up a remote control system, with one end (the transmitter) containing a button, and the other end (the receiver) containing a motor. When pressing the button the motor would then spin. After deciding on this as my basic idea I next moved to hooking up the different components attaching both a motor and a button to each breadboard. Finally before testing I set up the code. The main idea for the code was for a digital pin to detect when the button was pressed, which would alter the value of the variable. After this, the receiver was set up to have a conditional between the two possible outcomes of pressing the button, meaning once pressed the motor would move. Finally it was time to test, and it turned out as a huge success, with all parts working as they should, and blowing my expectations away from the extreme range that the electronics gave me, even after walking down the hallway (roughly 250m) the motor continued to receive data.




Comments